Research
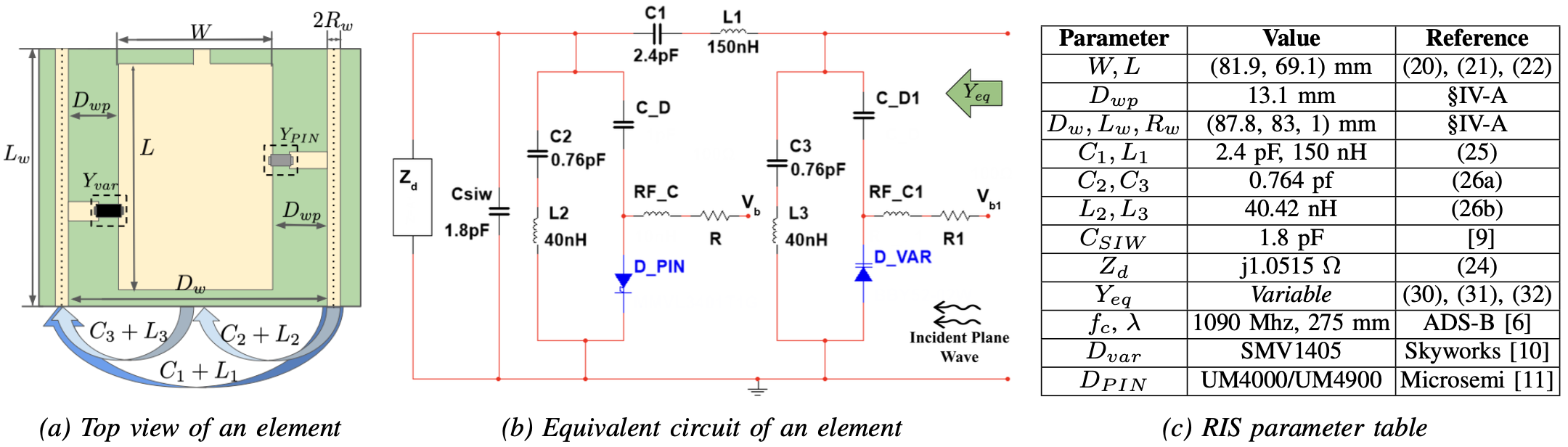
RIS circuit design
Advised by: Dr. Dola Saha and Dr. Aveek Dutta 2023 – present
Multistage 2D DoA Estimation in Low SNR
Advised by: Dr. Dola Saha and Dr. Aveek Dutta 2022 – present

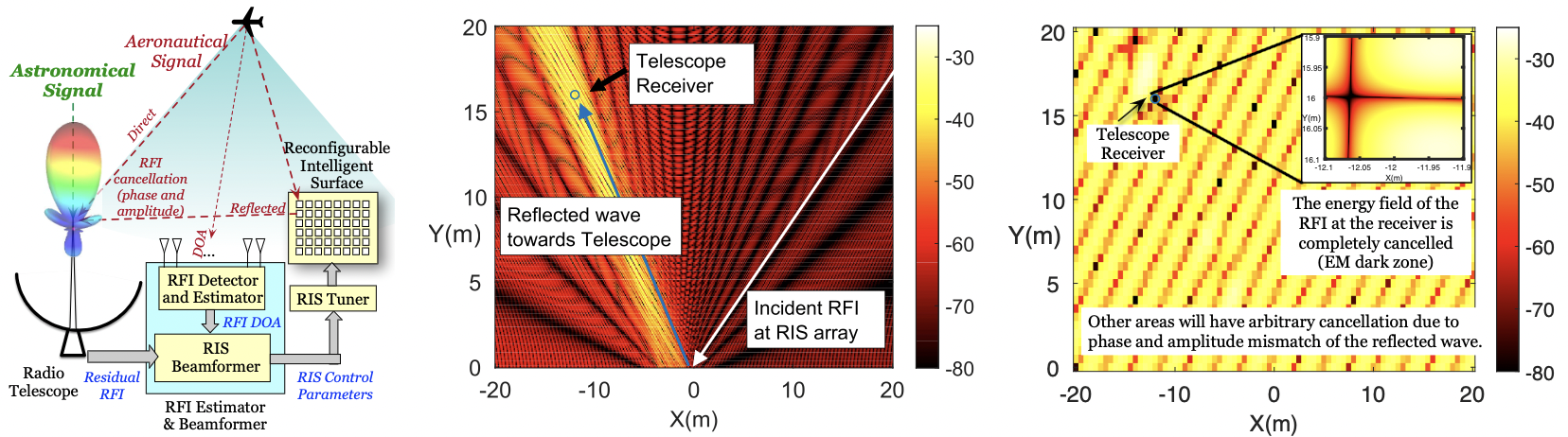
RFI cancellation using RIS
Advised by: Dr. Dola Saha and Dr. Aveek Dutta 2022 – present
Key generation
Advised by: Dr. Dola Saha 2022 – 2023
Wireless steganography
Advised by: Dr. Dola Saha 2021 – 2023
Teaching human motion
Advised by: Dr. Weifu Wang 2019 – 2020